
Fan Cheng Inspired by starfish, Carnegie Mellon University has developed a star shaped underwate
Опубликован в:2020-04-22
Researchers at Carnegie Mellon University recently developed Patrick, an unfettered software robot that can artificially replicate the structure and behavior of the marine invertebrate "fragile star" closely related to starfish. This unique bionic robot, published in a paper on arXiv, can crawl underwater with five legs driven by shape memory alloy (SMA) wires.
Zach Patterson, one of the researchers who conducted the study, told techxplore: "this work is a natural extension of our previous work in the laboratory, which uses muscle wires instead of motors to create unbound software robots." "Our inspiration for Patrick comes from this fragile star, which is an extremely agile star relative to starfish."
Patterson and his colleagues developed a robot that can perform simple underwater tasks and enhance the understanding of starfish and their underwater crawling behavior. In order to reproduce the ability of starfish to walk underwater most effectively, the researchers believe that their robot should not be bound to external hardware because it can move around more freely.
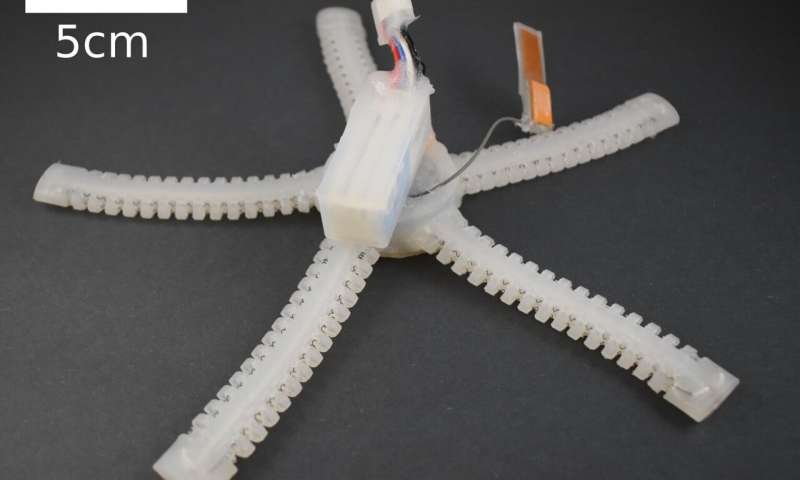
Patrick has five limbs driven by SMA coils and powered by shape memory alloy coils. Shape memory alloy is a metal with many superior properties, including high flexibility and toughness at room temperature and unique behavior during heating. In fact, when the current acts on SMA metal, SMA metal will heat up rapidly and return to its past shape.
"We use these deformable coils as a muscle to bend the robots legs in the desired direction. The robot is mainly made of silicone and is highly flexible and waterproof. In order to control Patricks motion, we have developed several motion Codes: specific shape change patterns are coordinated between the limbs that make the robot move as a whole," Patterson said
In addition to being highly flexible, Patterson and his colleagues also hope that their robots can perceive the surrounding environment and choose the direction of autonomous movement. To achieve this goal, they developed a framework that allows robots to communicate with underwater devices through wireless communication. This provides additional functionality for Patrick, which not only relies on the relatively cheap hardware components that make up its main body, but also allows Patrick to autonomously perceive its environment and perform calculations.
Source: Patterson
Another interesting feature of the soft robot developed by Patterson and his colleagues is that it can perform all kinds of possible actions underwater, because its legs are composed of several SMA "muscles", which can be rearranged in different ways. This is a little rare for mobile software robots. They usually can only make some simple movements or movements.
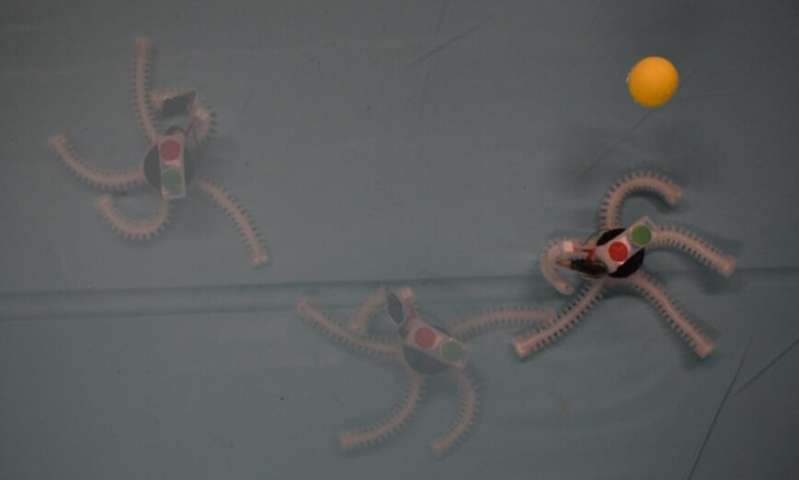
"We demonstrated that the robot can move to the desired target in real time, which is the first time in an untied soft robot," Patterson said In addition, we also found that even when there is great uncertainty in the surrounding environment and the behavior of the robot itself, a soft robot without any external hardware connection can reach the moving target by itself. In fact, due to the complex interaction between temperature, material deformation and friction, we can never determine how the robot will move in response to a given command.
Patricks ability to move autonomously underwater is a direct result of its flexible and complex structure. Although its complex design also makes its behavior difficult to predict, it finally enables the robot to automatically respond to the interference in the environment through deformation and shape change without expensive and high-performance control algorithms.
In the future, the starfish robot developed by this group of researchers may have many useful applications. For example, it can be used for geological exploration and minimally invasive ecological or biological sampling. In addition, Patterson and his colleagues hope that Patrick will also help to study the mechanism of starfish movement.
In the next research, researchers will test more control and planning algorithms, develop machine learning methods for control, and add sensors to the structure to enable the robot to handle more useful tasks.
Zach Patterson, one of the researchers who conducted the study, told techxplore: "this work is a natural extension of our previous work in the laboratory, which uses muscle wires instead of motors to create unbound software robots." "Our inspiration for Patrick comes from this fragile star, which is an extremely agile star relative to starfish."
Patterson and his colleagues developed a robot that can perform simple underwater tasks and enhance the understanding of starfish and their underwater crawling behavior. In order to reproduce the ability of starfish to walk underwater most effectively, the researchers believe that their robot should not be bound to external hardware because it can move around more freely.
Patrick has five limbs driven by SMA coils and powered by shape memory alloy coils. Shape memory alloy is a metal with many superior properties, including high flexibility and toughness at room temperature and unique behavior during heating. In fact, when the current acts on SMA metal, SMA metal will heat up rapidly and return to its past shape.
"We use these deformable coils as a muscle to bend the robots legs in the desired direction. The robot is mainly made of silicone and is highly flexible and waterproof. In order to control Patricks motion, we have developed several motion Codes: specific shape change patterns are coordinated between the limbs that make the robot move as a whole," Patterson said
In addition to being highly flexible, Patterson and his colleagues also hope that their robots can perceive the surrounding environment and choose the direction of autonomous movement. To achieve this goal, they developed a framework that allows robots to communicate with underwater devices through wireless communication. This provides additional functionality for Patrick, which not only relies on the relatively cheap hardware components that make up its main body, but also allows Patrick to autonomously perceive its environment and perform calculations.
Source: Patterson
Another interesting feature of the soft robot developed by Patterson and his colleagues is that it can perform all kinds of possible actions underwater, because its legs are composed of several SMA "muscles", which can be rearranged in different ways. This is a little rare for mobile software robots. They usually can only make some simple movements or movements.
"We demonstrated that the robot can move to the desired target in real time, which is the first time in an untied soft robot," Patterson said In addition, we also found that even when there is great uncertainty in the surrounding environment and the behavior of the robot itself, a soft robot without any external hardware connection can reach the moving target by itself. In fact, due to the complex interaction between temperature, material deformation and friction, we can never determine how the robot will move in response to a given command.
Patricks ability to move autonomously underwater is a direct result of its flexible and complex structure. Although its complex design also makes its behavior difficult to predict, it finally enables the robot to automatically respond to the interference in the environment through deformation and shape change without expensive and high-performance control algorithms.
In the future, the starfish robot developed by this group of researchers may have many useful applications. For example, it can be used for geological exploration and minimally invasive ecological or biological sampling. In addition, Patterson and his colleagues hope that Patrick will also help to study the mechanism of starfish movement.
In the next research, researchers will test more control and planning algorithms, develop machine learning methods for control, and add sensors to the structure to enable the robot to handle more useful tasks.
